The secret to “thinking outside the box” is to never have your thinking put in a box in the first place. Thanks, Mom. This would not have happened to me without you making it happen, and I only just now figured this out.
The secret to “thinking outside the box” is to never have your thinking put in a box in the first place. Thanks, Mom. This would not have happened to me without you making it happen, and I only just now figured this out.

This is not a joke. I don’t know any way to make it plainer than this.
“Aspie,” in case you do not know, is a word commonly used within the community of people with Asperger’s Syndrome, as an informal term for ourselves. I don’t claim to speak for all Aspies, of course, but this is certainly true for me, as well as many others I know. Some Aspies have figured out how to recognize and understand pranks, but I am not one of them. I don’t understand why people play pranks . . . at all.

After using Geometer’s Sketchpad and MS-Paint to make the image on the faces (seen alone in the last post), I then used Stella 4d: Polyhedron Navigator to project these images onto a red dodecahedron, and create this .gif. Stella is available, including as a free trial download, at http://www.software3d.com/Stella.php.

Portmanteaus of the words “zillion” and “googol” / “googleplex,” these two new number-names are offered for the use of anyone who feels a need for even more named numbers which are ridiculously larger than the number of particles known to exist. The vast majority of those particles are neutrinos, by the way, but fewer than a googol (let alone a zoogle) neutrinos are estimated to exist in the entire observable universe.
To write a zoogle out the long way, simply write a “1,” then follow it with a “mere” one million zeroes. To my knowledge, this has never been done, but it certainly is possible. To write out a zoogleplex the long way, you’d need to follow the “1” with a zoogol zeroes, but this is not possible, due to a lack of enough matter or space, in the entire universe, for such a task.
Pop quiz: which is larger: a googleplex, or a zoogle? Scroll down to find the answer, whenever you are ready.
(keep scrolling….)
A googolplex is vastly larger than a zoogol. However, all other numbers mentioned earlier in this post are dwarfed by a zoogolplex. However, even a zoogolplex is less than 1% of 1% of 1% of . . . 1% of infinity, no matter how long one makes the “of 1%” chain.
An interesting phenomenon in physics, and physics education, is the simplicity of symmetric situations, compared to the complexity of similar situations which are, instead, asymmetrical. Students generally learn the symmetrical versions first, such as this static equilibrium problem, with the hanging masses on both left and right equal.

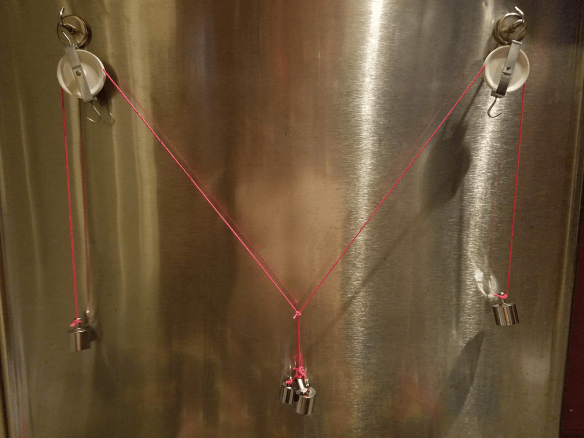
The problem is to find the measures of the three angles shown above, with values given for all three masses. Here is the setup, using physical objects, rather than a diagram.
The masses on the left and right are each 100 g, or 0.100 kg, while the central masses total 170 g, or 0.170 kg. Since all hanging masses are in static equilibrium, the forces pulling at the central point (at the common vertex of angles λ, θ, and ρ) must be balanced. Specifically, downward tension in the strings must be balanced by upward tension, and the same is true of tension forces to the left and to the right. In the diagram below (deliberately asymmetrical, since that’s coming soon), these forces are shown, along with the vertical and horizontal components of the tension forces held in the diagonal strings.

Because the horizontal forces are in balance, Tlx = Trx, so Mlgcosλ = Mrgcosρ — which is not useful now, but it will become important later. In the symmetrical situation, all that is really needed to solve the problem is the fact that the vertical forces are in balance. For this reason, Tc = Tly + Try, so Mcg = Mlgsinλ + Mrgsinρ. Since, due to symmetry, Ml = Mr and λ = ρ, Mr may be substituted for Ml, and ρ may be substituted for λ, in the previous equation Mcg = Mlgsinλ + Mrgsinρ, yielding Mcg = Mrgsinρ + Mrgsinρ, which simplifies to Mcg =2Mrgsinρ. Cancelling “g” from each side, and substituting in the actual masses used, this becomes 0.170 kg = 2(0.100 kg)sinρ, which simplifies to 0.170 kg = (0.200 kg)sinρ, then 0.170/0.200 = sinρ. Therefore, angle ρ = sin-1(0.170/0.200) = 58°, which, by symmetry, must also equal λ. Since all three angles add up to 180º, the central angle θ = 180° – 58° – 58° = 64°. These answers can then be checked against the physical apparatus.
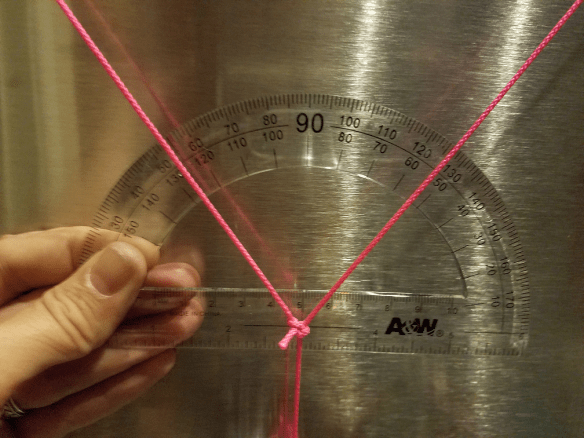
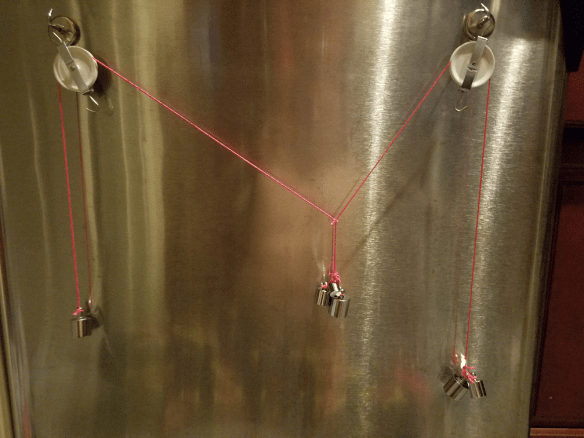
When actually checked with a protractor, the angles on left and right are each about 53° — which is off from the predicted value of 58° by about 9%. The central angle, of course, is larger, at [180 – (2)53]° = 74°, to make up the difference in the two smaller angles. The error here could be caused by several factors, such as the mass of the string itself (neglected in the calculations above), friction in the pulleys, or possibly the fact that the pulleys did not hang straight down from the hooks which held them, but hung instead at a slight diagonal, as can be seen in the second image in this post. This is testable, of course, by using thinner, less massive string, as well as rigidly-fixed, lower-friction pulleys. However, reducing the error in a lab experiment is not my objective here — it is, rather, use of a simple change to turn a relatively easy problem into one which is much more challenging to solve.
In this case, the simple change I am choosing is to add 50 grams to the 100 g already on the right side, while leaving the central and left sides unchanged. This causes the angles where the strings meet to change, until the situation is once more in static equilibrium, with both horizontal and vertical forces balanced. With the mass on the left remaining at 0.100 kg, the central mass at 0.170 kg, and the mass on the right now 0.150 kg, what was an easy static equilibrium problem (finding the same three angles) becomes a formidable challenge.
For the same reasons as before (balancing forces), it remains true that Mlgcosλ = Mrgcosρ (force left = force right), and, this time, that equation will be needed. It also remains true that Mcg = Mlgsinλ + Mrgsinρ (downward force = sum of the two upward forces). The increased difficulty is caused by the newly-introduced asymmetry, for now Ml ≠ Mr, and λ ≠ ρ as well. It remains true, of course, that λ + θ + ρ = 180°.
In both the vertical and horizontal equations, “g,” the acceleration due to gravity, cancels, so Mlgcosλ = Mrgcosρ becomes Mlcosλ = Mrcosρ, and Mcg = Mlgsinλ + Mrgsinρ becomes Mc = Mlsinλ + Mrsinρ. The simplified horizontal equation, Mlcosλ = Mrcosρ, becomes Ml²cos²λ = Mr²cos²ρ when both sides are squared, in order to set up a substitution based on the trigonometric identity, which works for any angle φ, which states that sin²φ + cos²φ = 1. Rearranged to solve it for cos²φ, this identity states that cos²φ = 1 – sin²φ. Using this rearranged identity to make substitutions on both sides of the previous equation Ml²cos²λ = Mr²cos²ρ yields the new equation Ml²(1 – sin²λ) = Mr²(1 – sin²ρ). Applying the distributive property yields the equation Ml² – Ml²sin²λ = Mr² – Mr²sin²ρ. By addition, this then becomes -Ml²sin²λ = Mr² – Ml² – Mr²sin²ρ. Solving this for sin²λ turns it into sin²λ = (Mr² – Ml² – Mr²sin²ρ)/(-Ml²).
Next, Mc = Mlsinλ + Mrsinρ (the simplied version of the vertical-force-balance equation, from above), when solved for sinλ, becomes sinλ = (Mrsinρ – Mc)/(- Ml). Squaring both sides of this equation turns it into sin²λ = (Mr²sin²ρ – 2MrMcsinρ + Mc²)/(- Ml)².
There are now two equations solved for sin²λ, each shown in bold at the end of one of the previous two paragraphs. Setting the two expressions shown equal to sin²λ equal to each other yields the new equation (Mr² – Ml² – Mr²sin²ρ)/(-Ml²) = (Mr²sin²ρ – 2MrMcsinρ + Mc²)/(- Ml)², which then becomes (Mr² – Ml² – Mr²sin²ρ)/(-Ml²) = (Mr²sin²ρ – 2MrMcsinρ + Mc²)/(Ml)², and then, by multiplying both sides by -Ml², this simplifies to Mr² – Ml² – Mr²sin²ρ = – (Mr²sin²ρ – 2MrMcsinρ + Mc²), and then Mr² – Ml² – Mr²sin²ρ = – Mr²sin²ρ + 2MrMcsinρ – Mc². Since this equation has the term – Mr²sin²ρ on both sides, cancelling it simplifies this to Mr² – Ml² = 2MrMcsinρ – Mc², which then becomes Mr² – Ml² + Mc² = 2MrMcsinρ, and then sinρ = (Mr² – Ml² + Mc²)/2MrMc = [(0.150 kg)² – (0.100 kg)² + (0.170 kg)²]/[2(0.150 kg)(0.170 kg)] = (0.0225 – 0.0100 + 0.0289)/0.0510 = 0.0414/0.510 = 0.812. The inverse sine of this value gives us ρ = 54°.
Having one angle’s measure, of course, makes it far easier to find the others. Two paragraphs up, an equation in italics stated that sinλ = (Mrsinρ – Mc)/(- Ml). It follows that λ = sin-1[(Mrsinρ – Mc)/(- Ml)] = sin-1[(0.150kg)sinρ – 0.170kg)/(-0.100kg)] = 29°. These two angles sum to 83°, leaving 180° – 83° = 97° as the value of θ.
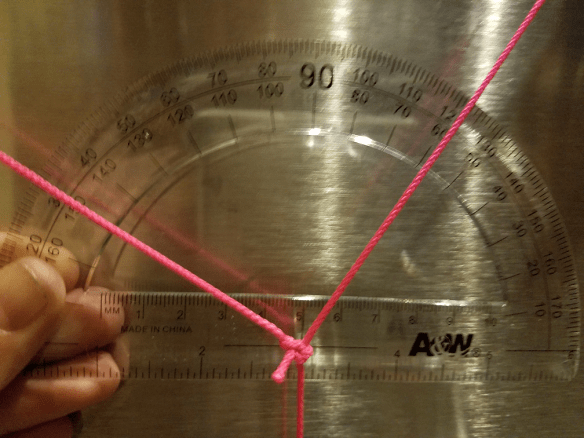
As can be seen above, these derived values are close to demonstrated experimental values. The first angle found, ρ, measures ~58°, which differs from the theoretical value of 54° by approximately 7%. The next, λ, measures ~31°, also differing from the theoretical value, 29°, by about 7%.The experimental value for θ is (180 – 58 – 31)° = 91°, which is off from the theoretical value of 97° by ~6%. All of these errors are smaller than the 9% error found for both λ and ρ in the easier, symmetrical version of this problem, and the causes of this error should be the same as before.
 The interior angles in these rhombi all measure π/9 radians, or some whole-number multiple of that amount, up to 8π/9 radians.
The interior angles in these rhombi all measure π/9 radians, or some whole-number multiple of that amount, up to 8π/9 radians.

Created using Stella 4d, available here.
